Baza (przestrzeń liniowa)
Bazy w nieskończenie wymiarowych przestrzeniach nazywane są czasami bazami Hamela (jest to częsty zwyczaj w analizie funkcjonalnej). Z drugiej strony, niektórzy matematycy rezerwują nazwę baza Hamela dla dowolnej bazy przestrzeni liczb rzeczywistych jako przestrzeni liniowej nad ciałem liczb wymiernych.
A.
Dane są dwie bazy w przestrzeni wektorowej dwu-wymiarowej:
1. {e1,e2};
2. {f1≡e1+e2, f2≡ e1-e2}. Wyznaczyć wektor v w bazie {f1, f2}
v=2e1+3e2≈
|
2
|
3
|
2
|
≈x·[f1]+ y·[f2]
|
3
|
v = x·[e1+e2]+y·[ e1-e2]
B.
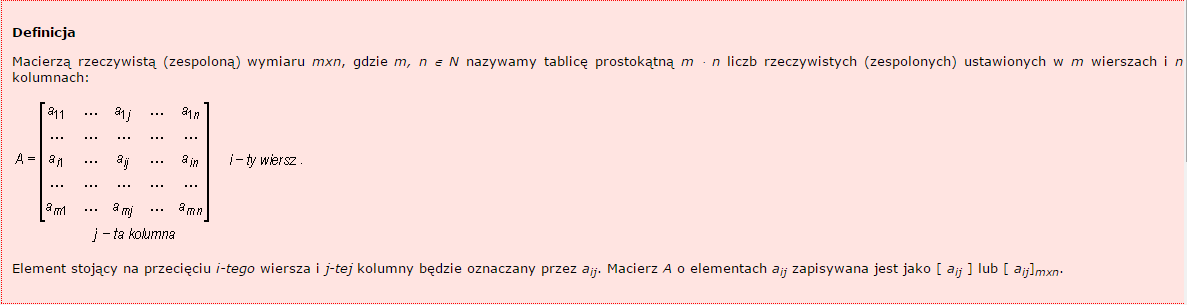
Macierzą rzeczywistą (zespoloną) wymiaru mxn, gdzie m, n Î N nazywamy tablicę prostokątną m × n liczb rzeczywistych (zespolonych) ustawionych w m wierszach i n kolumnach:
Rodzaje macierzy:
*Macierz kwadratowa stopnia n
*Macierz diagonalna stopnia n
*Macierz jednostkowa stopnia n
*Wektor kolumnowy
*Wektor wierszowy
*Macierzą dolnotrójkątną
*Macierz zerowa
Macierz – w matematyce układ liczb, symboli lub wyrażeń zapisanych w postaci prostokątnej tablicy. Choć słowo „macierz” oznacza najczęściej macierz dwuwskaźnikową, to możliwe jest rozpatrywanie macierzy wielowskaźnikowych (zob. notacja wielowskaźnikowa). Macierze jednowskaźnikowe nazywa się często wektorami wierszowymi lub kolumnowymi, co wynika z zastosowań macierzy w algebrze liniowej. W informatyce macierze modeluje się zwykle za pomocą (najczęściej dwuwymiarowych) tablic.
Macierze wprowadza się często jako sposób skondensowanego zapisu układów równań liniowych, co ma na celu wyeliminowanie powtarzających się elementów standardowej notacji układów równań tego rodzaju z wieloma niewiadomymi[a]. Same układy pojawiają się wprost podczas algebraizacji zagadnień geometrycznych (równania linioweparametryzujące punkty, proste, płaszczyzny itd.). Wyrosłym na tym gruncie, podstawowym przeznaczeniem macierzy jest jednak sformułowanie spójnego, a zarazem zwartego sposobu zapisu pojęć i twierdzeń algebry liniowej, a więc przede wszystkim opisuprzekształceń liniowych między dwoma przestrzeniami liniowymi nad wspólnym ciałem(skończeniewymiarowych, z ustalonymi bazami), czy form dwuliniowych na przestrzeni liniowej (skończonego wymiaru z wybraną bazą). Nieomalże wszystkie inne zastosowania wynikają z tych interpretacji − macierz Jacobiego, macierz Hessego, czy gradient obecne w analizie wielowymiarowej to macierze pochodnych (przedstawiane w ustalonych bazach, zwykle standardowych); podobnie ma się rzecz z wieloma możliwościami rozkładu macierzyna iloczyn macierzy o ustalonych własnościach − odpowiadają one złożeniom odpowiednich przekształceń. Macierze bada się również niezależnie od jakichkolwiek zastosowań (rozwijając w ten sposób dostępny aparat pojęciowy); samodzielny dział matematyki im poświęcony nazywa się teorią macierzy.
Macierze wprowadza się często jako sposób skondensowanego zapisu układów równań liniowych, co ma na celu wyeliminowanie powtarzających się elementów standardowej notacji układów równań tego rodzaju z wieloma niewiadomymi[a]. Same układy pojawiają się wprost podczas algebraizacji zagadnień geometrycznych (równania linioweparametryzujące punkty, proste, płaszczyzny itd.). Wyrosłym na tym gruncie, podstawowym przeznaczeniem macierzy jest jednak sformułowanie spójnego, a zarazem zwartego sposobu zapisu pojęć i twierdzeń algebry liniowej, a więc przede wszystkim opisuprzekształceń liniowych między dwoma przestrzeniami liniowymi nad wspólnym ciałem(skończeniewymiarowych, z ustalonymi bazami), czy form dwuliniowych na przestrzeni liniowej (skończonego wymiaru z wybraną bazą). Nieomalże wszystkie inne zastosowania wynikają z tych interpretacji − macierz Jacobiego, macierz Hessego, czy gradient obecne w analizie wielowymiarowej to macierze pochodnych (przedstawiane w ustalonych bazach, zwykle standardowych); podobnie ma się rzecz z wieloma możliwościami rozkładu macierzyna iloczyn macierzy o ustalonych własnościach − odpowiadają one złożeniom odpowiednich przekształceń. Macierze bada się również niezależnie od jakichkolwiek zastosowań (rozwijając w ten sposób dostępny aparat pojęciowy); samodzielny dział matematyki im poświęcony nazywa się teorią macierzy.
C.Obliczanie.
A·A=A2=
|
3 -1
|
·
|
3 -1
|
=
|
3·3+(-1)·(-2) 3·(-1)+(-1)·4
|
-2 4
|
-2 4
|
-2·3+4·(-2) -2·(-1)+4·4
|
A·A=A2=
|
11 -7
|
-14 18
|
A2·A=
|
11 -7
|
·
|
3 -1
|
=
|
11·3+(-7)·(-2) 11·(-1)+(-7)·4
|
-14 18
|
-2 4
|
-14·3+18·(-2) -14·(-1)+18·4
|
A2·A=
|
47 -39
|
-78 86
|
A·A2=
|
3 -1
|
·
|
11 -7
|
=
|
3·11+(-1)·(-14) 3·(-7)+(-1)·18
|
-2 4
|
-14 18
|
-2·11+4·(-14) -2·(-7)+4·18
|
A·A2=
|
47 -39
|
-78 86
|
A2·A= A·A2=A3


 będzie
będzie  ,
,  będzie przestrzenią do niej
będzie przestrzenią do niej  i
i  będą nieujemnymi liczbami całkowitymi. Rozważmy
będą nieujemnymi liczbami całkowitymi. Rozważmy  .
.
 ) p-krotnie kowariantnym i q-krotnie kontrawariantnym. Dla
) p-krotnie kowariantnym i q-krotnie kontrawariantnym. Dla  mówi się o tensorze kontrawariantnym a dla
mówi się o tensorze kontrawariantnym a dla  , o tensorze kowariantnym. Przyjmuje się, że tensory typu (0,0) to skalary (elementy ciała
, o tensorze kowariantnym. Przyjmuje się, że tensory typu (0,0) to skalary (elementy ciała  wszystkich tensorów typu
wszystkich tensorów typu  na
na  oraz
oraz  będą dowolnymi pierścieniami.
będą dowolnymi pierścieniami. i
i  nazywamy dowolne odwzorowanie
nazywamy dowolne odwzorowanie  takie, że
takie, że oraz
oraz .
.
 taki, że:
taki, że: jest podgrupą grupy addytywnej pierścienia
jest podgrupą grupy addytywnej pierścienia oraz
oraz  , to
, to 
 , to
, to 

 oznaczamy najmniejszy (w sensie zawierania się zbiorów) ideał pierścienia
oznaczamy najmniejszy (w sensie zawierania się zbiorów) ideał pierścienia 
 jest bezkwadratową liczbą całkowitą, to
jest bezkwadratową liczbą całkowitą, to ![\mathbb Z\left[\sqrt d\right] = \{ a+b\sqrt{d} : a,b\in\mathbb Z \}](https://upload.wikimedia.org/math/2/8/6/28614ac91fe710577690f0e43184b68a.png) jest podpierścieniem ciała
jest podpierścieniem ciała  jest ideałem, zwanym trywialnym.
jest ideałem, zwanym trywialnym. liczb całkowitych przykładem ideału jest zbiór wszystkich liczb parzystych. Ideałem jest również zbiór wszystkich liczb podzielnych przez
liczb całkowitych przykładem ideału jest zbiór wszystkich liczb parzystych. Ideałem jest również zbiór wszystkich liczb podzielnych przez  . Ogólniej, każdy ideał pierścienia
. Ogólniej, każdy ideał pierścienia  . Zatem
. Zatem  jest
jest  jest ideałem w pierścieniu
jest ideałem w pierścieniu 